

Stage 1 of 8: electronics integrationeVTOL · Autonomy · Power
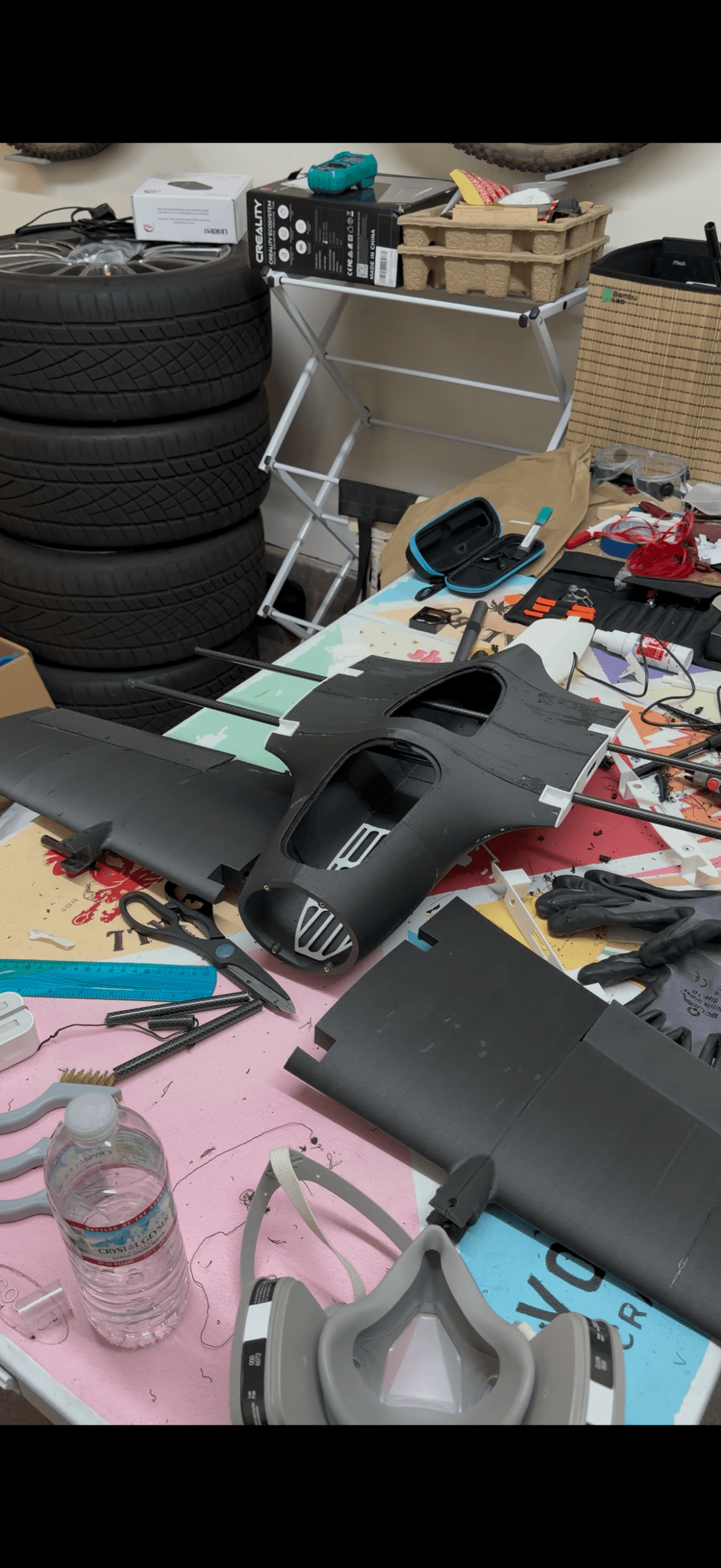
Raven
Fixed-wing in cruise, three-motor VTOL in hover. Designed, analyzed, and printed in carbon-fiber composite, on an 8-stage roadmap that ends in a fully autonomous 4-drone swarm with wireless charging at home base.
eVTOLtilt-rotorautonomycarbon fiberFEA/CFDswarmfirmware
View project 
